-
-
2732
- 작성자서정원
- 작성일2021-12-23
- 5878
- 동영상동영상
-
-
2730
- 작성자서정원
- 작성일2021-12-22
- 4117
- 동영상동영상
-
-
2728
- 작성자이솔
- 작성일2021-12-21
- 3815
- 동영상동영상
-
-
2726
- 작성자서정원
- 작성일2021-12-20
- 4363
- 동영상동영상
-
-
2724
- 작성자이솔
- 작성일2021-12-17
- 6852
- 동영상동영상
-
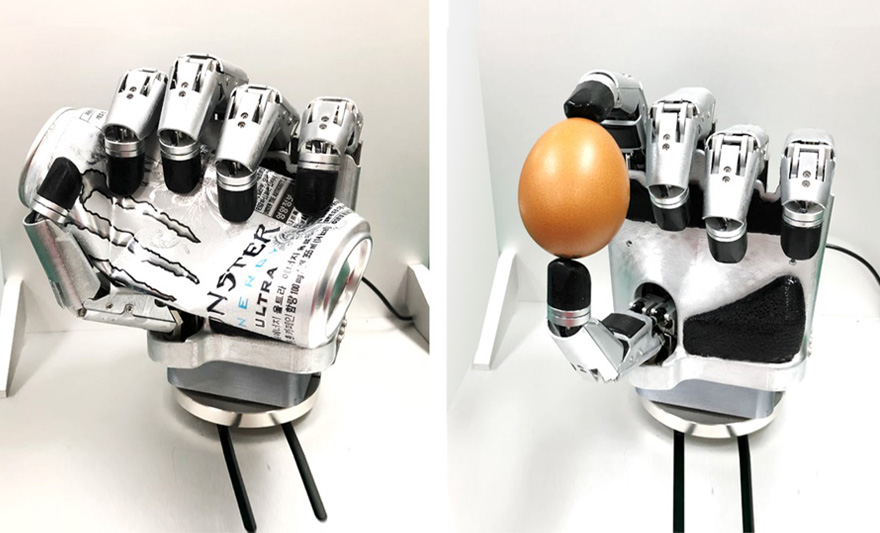
우리 대학 연구자가 강력한 악력을 가지면서 동시에 섬세한 도구 조작도 가능한 인간형 로봇 손을 개발하는 데 성공했다. 로봇 손 구동을 위한 모든 구성요소가 자체 내장된 데다 기존의 로봇 손들로는 불가능했던 여러 작업이 가능해 앞으로 다양한 분야에 활용될 전망이다.김의겸 교수(기계공학과)는 촉각 센서와 구동기를 비롯한 모든 구성요소를 포함한 일체형(All-in-one) 인간형 로봇 손 개발에 성공했다고 밝혔다. 이번에 개발한 로봇 손은 일상 생활에 필요한 대부분의 도구를 조작할 수 있을 뿐 아니라 인간 수준의 자유로운 움직임이 가능하다.이번 연구 성과는 저명 학술지 <네이처 커뮤니케이션즈(Nature Communications, Impact Factor 14.919)> 12월15일자에 온라인 게재됐다. 논문 제목은 ‘링크 구동 기반의 모든 구성요소가 통합된 인간형 로봇 손 (Integrated Linkage-Driven Dexterous Anthropomorphic Robotic Hand)’이다. 이번 연구에는 제1저자 및 교신저자로 김의겸 아주대 교수(기계공학과)가, 공동 제1저자로 정다운 고려대 박사과정 학생이 참여했으며, 한국기계연구원(KIMM) 로봇메카트로닉스실과의 협력 연구로 진행되었다.연구팀이 개발한 로봇 손은 강력한 악력을 가지면서 동시에 섬세한 도구 조작이 가능하다. 이번에 개발한 로봇 손이 들 수 있는 무게는 18kg에 달한다. NASA가 개발한 로봇(Robonaut II hand)의 가반하중이 9kg인 것을 고려해 볼 때, 아주대 연구팀이 개발한 로봇 손의 가반하중 18kg은 매우 높은 수준이다. 이에 기존의 로봇 손들로는 불가능했던 ▲맥주 캔 찌그러뜨리기 ▲무거운 아령 들기 등을 수행할 수 있다. 더불어 섬세한 움직임과 높은 자유도를 필요로 하는 다양한 도구의 사용도 가능하다. 연구팀은 이 로봇 손을 활용해 ▲가위로 종이 자르기 ▲핀셋으로 작은 칩 옮기기 등을 시현하는 데 성공했다. 인간형 로봇 손은 로봇 말단 장치 중 가장 작업의 영역이 넓고 활용성 역시 매우 높다. 현재 개발된 로봇 말단 장치들은 특정 환경에 특화되어 개발되었기 때문에 다양한 환경에서의 사용이 매우 제한적이다. 이에 국내·외 많은 연구자들이 인간형 로봇 손에 대해 활발한 연구를 해왔다. 그러나 사람 손 수준의 자연스러운 움직임과 강한 악력, 촉각에 기반한 섬세함까지를 모두 구현해 내기에는 여러 한계가 있었다. 특히 로봇 손은 우수한 성능을 얻기 위해 촉각 센서, 구동기, 제어기 등의 구성 요소를 필요로 하며, 이는 로봇 팔뚝 형태에 추가 모듈로 포함되어야 했다. 추가 모듈은 로봇 손과 상용 로봇 팔과의 결합을 어렵게 하는 요소가 된다.김의겸 교수팀은 이러한 문제를 해결하기 위해 촉각 센서와 구동기, 제어기 등의 모든 구성 요소를 로봇 손 자체에 내장시켜 완성해 냈다. 모든 구성 요소가 일체화(All-in-one)된 형태로 높은 자유도와 강한 악력, 정밀한 제어가 모두 가능한 고성능 로봇 손을 구현해 낸 것. 이에 기존 로봇 손에 비해 더욱 다양한 환경에서 폭넓은 활용이 가능하다. 이번 연구의 핵심 기술로는 링크 기반의 새로운 메커니즘 기술과 촉각 센서의 결합 기술을 들 수 있다. 연구팀은 링크 기반의 병렬 메커니즘과 직렬 메커니즘을 조합하여 새로운 메커니즘을 개발, 이를 통해 로봇 손 손가락의 독립적인 3자유도 움직임을 구현해 냈다. 3자유도 움직임이란손가락의 가장 안쪽 관절(중수지절간관절)에서의 두 방향 움직임(앞/뒤, 좌/우)과 중간 관절(근위지절간관절)의 한 방향 움직임(앞/뒤)을 의미한다. 김의겸 교수는 “손가락 크기의 좁은 공간에서 인간 손가락과 같은 3자유도의 독립적 움직임을 구현해 내는 것은 쉽지 않은 과제”라며 “링크 기반의 새로운 메커니즘 기술을 개발함으로써 이를 해결할 수 있었고 덕분에 기존 상용 로봇 팔과의 결합이 용이했다”고 설명했다.연구팀은 또한 로봇 손가락 끝에 민감도가 높은 6축 힘토크 센서를 내장, 손가락 끝에서 섬세하게 힘의 크기와 방향, 위치를 모두 측정할 수 있게 했다. 이 촉각 센서를 로봇 손에 내장하기 위해 연구팀은 결합 형태, 배선, 통신, 측정 보드를 고려하였고 컴팩트하게 결합할 수 있었다.김의겸 교수는 “이번에 개발한 고성능 로봇 손은 로봇 그리퍼나 의수를 비롯해 여러 분야에서 쓰일 수 있다”라며 “로봇 제어 연구, 딥러닝이나 강화학습 연구 등에도 적용 가능해 산업계와 우리 사회의 여러 영역에서 널리 활용되기를 기대한다”고 전했다. 이번 연구는 아주대학교 정착연구비 지원과 한국기계연구원 창의도전형 과제 지원으로 수행되었다. 이번에 개발된 로봇 손의 가반하중(물체를 들 수 있는 힘)은 18kg이다. 손가락 끝단에서 낼 수 있는 힘은 34N이고, 높은 자유도(15DOF), 20개의 관절 수, 1.1kg의 가벼운 무게, 최대 길이 218mm의 하드웨어 성능을 지닌다.
-
2722
- 작성자이솔
- 작성일2021-12-17
- 7533
- 동영상동영상
-
-
2720
- 작성자서정원
- 작성일2021-12-17
- 7181
- 동영상동영상
-
-
2718
- 작성자이솔
- 작성일2021-12-16
- 4427
- 동영상동영상
-
-
2716
- 작성자서정원
- 작성일2021-12-16
- 5743
- 동영상동영상
-
-
2714
- 작성자이솔
- 작성일2021-12-15
- 3561
- 동영상동영상
-
-
2712
- 작성자서정원
- 작성일2021-12-14
- 7348
- 동영상동영상
-
-
2710
- 작성자이솔
- 작성일2021-12-14
- 3526
- 동영상동영상